
ロボットスーツHAL®(ハル、Hybrid Assistive Limb)は、医療介護分野で働く人たちにとって、一度はその名前を聞いたことはあるかと思います。
茨城県つくば市に本拠地を置くCYBERDYNE 社(代表取締役 山海嘉之氏)が開発し、2006年にグッドデザイン金賞を受賞。
その革新性に国内のみならず海外まで衝撃を受けました。
2014年には下肢タイプが希少疾患用医療機器に指定された装着型ロボットスーツHAL®は日本発の世界で唯一の技術が搭載されています。
発表から10年以上が経ち、国内はもとより欧米やアジアなど海外でも使用が広がっています。
この装着型ロボットスーツHAL®ですが、大きくは3つのタイプがあり、国内では大学病院などの急性期医療の現場や回復期リハビリテーション病院などで使用されている下肢タイプや単関節タイプ。また介護の業務で使用されている腰タイプと複数のラインナップがあります。
これらのラインナップを通して、HAL®の根幹を成しているのがサイバニクス技術です。
このサイバニクス技術についてですが、HAL®を使用したことのある人であればある程度理解はされているかとは思います。しかし、急性期や回復期以降のフェーズとなる維持期や介護保険関連施設の領域ではまだHAL®に触れたことがない、という方も多くいらっしゃるのではないでしょうか。
これまで、医療現場ではHAL®といえば下肢タイプが主流な感じで捉えられているイメージがあります。また介護現場では、下肢タイプも使用されているようですが、腰タイプを介護業務で使っているという感じかと思います。
そこで今回は、HAL®のモデルに共通しているサイバニクス技術について理解を深めていきたいと思います。
本特集によってHAL®の利用イメージを深めることや、これからの臨床業務や介護業務でHAL®を使用する機会が出てきたときに、スムーズに使用していけるように、本特集を活用していただければ嬉しく思います。
それでは、サイバニクス技術とHAL®の原理についてみていきましょう。
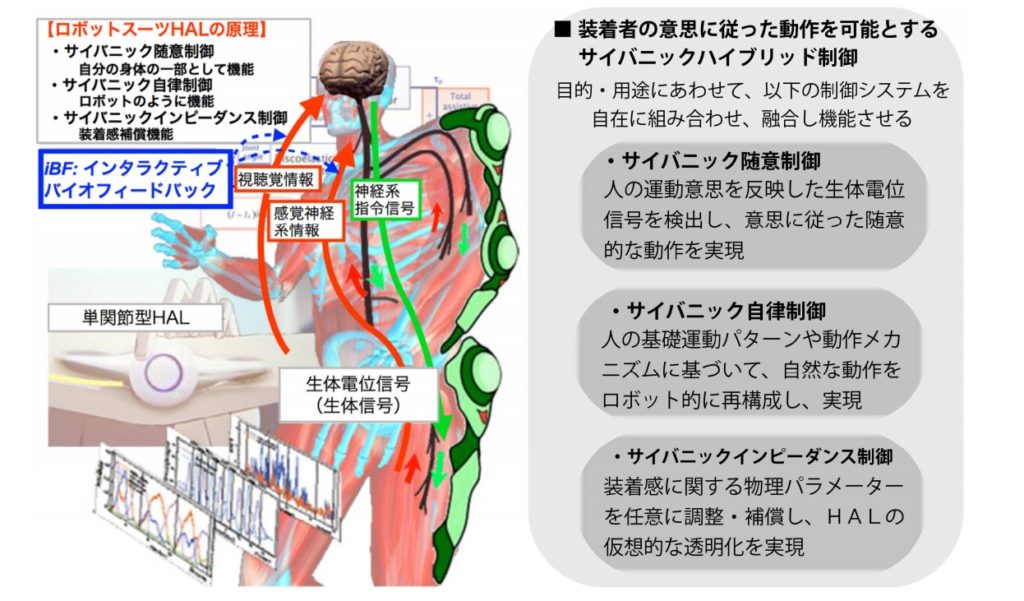
HAL®は、装着者の脳神経系からの動作意思を反映した微弱な生体電位信号(Bio-Electrical Signal:BES)で機能する「サイバニック随意制御系」、姿勢や重心バランス等の装着者の動作情報を人工知能処理し機能する「サイバニック自律制御系」、装着者の人間特性に適応調整される「サイバニックインピーダンス制御系」、及びこれらを組み合わせた「サイバニックハイブリッド制御系」などで構成される革新的サイバニックシステムです。
人が身体を動かそうとする際、その運動意思は微弱なイオン電流の神経系指令信号として、脳、脊髄、運動神経、筋肉へと伝達され、最終的に筋骨格系が動くことになります。その際、微弱な生体電位信号が皮膚表面にも到達してくるので、これを検出できれば運動意思を捉えたことになります。HAL®はこの微弱な生体電位信号を装着者の皮膚表面に張り付けられたセンサーで検出し、これを活用して機能します。これにより、装着者が身体を動かそうとすると、その運動意思に従ってHAL®が駆動します。HAL®は身体に密着しているため、装着者の意思によって駆動すると同時に、脚などの装着部位を動かすことになり、筋紡錘からの求心性ニューロンの信号が感覚神経、脊髄を経て脳に戻る(フィードバックされる)ことになります。更に、このような体内の感覚神経系情報に加え視聴覚情報も脳にフィードバックされることになります。このようにして、「脳→脊髄→運動神経→筋肉→HAL®」、そして、「HAL®→筋紡錘→感覚神経→脊髄→脳」という脳と身体とHAL®との間でインタラクティブなバイオフィードバックが構成されることになります。
これが基本的な「サイバニック随意制御」であり、機能的に人間とロボットとを一体化させることに成功した新しい制御手法の動作原理の一つです。また、重度の運動機能障害を有する場合、特に、生体電位信号がまだ検出できないような状態では、「サイバニック随意制御」が機能しないため、人間の基本運動パターンや動作メカニズムの解析結果を元に予め準備されたプログラムによってロボットのように動作する「サイバニック自律制御」が機能します。また、HAL®の質量・慣性モーメント・粘性摩擦等の機械インピーダンス制御も組み込まれています。目的に応じて、これらの制御を自在に組み合わせたサイバニックハイブリッド制御を構成できることがHAL®の大きな特徴となります。
つまり、身体に張り付けた電極が動こうとする意思を感知して、ロボットスーツHAL®が作動するということです。
これはHAL®を装着しなくても、人とHAL®が電極コードでつながっていれば、HAL®を横に置いた状態でも作動させることができるということです。
その人が身体を動かそうとすると、実際には装着されていないにもかかわらず、HAL®がその意思に合わせて動くのです。
~PRESENTED BY CYBERDYNE~
いかがでしたか?
サイバニクス技術とHAL®の動作原理について、その凄さを知っていただけたのではないかと思います。
表面筋電の検出や電気刺激とはまた異なるという点についても知っていただけたかと思います。
このサイバニック技術については、ニューロリハビリテーションの分野でも非常に期待されているところでもあります。これからの臨床現場や介護現場を担う方々には是非とも知っておいていただきたい内容かと思います。
最後に、HAL®の下肢タイプと腰タイプについて、下肢タイプは医療現場向き、腰タイプは介護支援向き、というイメージを抱きやすいのですが、最近リリースされた情報によると、腰タイプを機能訓練に用いることが提案されているのです。
つまり、介護施設の利用者や入居者といった方々に、従来の機能訓練に加えて、HAL®を使った簡単なトレーニングを数種類行うことで、起立動作の向上が得られたり、歩行状態の改善につながるケースも出てきているという報告を聞いています。
最後までご覧くださりありがとうございました。
作成者:逢坂大輔(日本ロボットリハビリテーション・ケア研究会 世話人)


